

The original Sensor to Mitsubishi lift integration was made using a specification called “Elevator Link Interface Processor” also referred to as E-LIP. This specification was written 2015/08/23 by Mitsubishi. Documentation for this integration can be found at: https://sensoraccess.zendesk.com/hc/en-us/articles/360001032972-Mitsubishi-Lift-support-with-E-LIP
A new protocol has now been created by Mitsubishi called ELSGW – Elevator-security Gateway written 2018/07/06. Sensor access does not have a particular software development for this new lift protocol nor a live site using this. Due to Sensor’s access control software’s unique capability’s it is still possible to send the new protocol commands using the GuardPoint10 software:
Schematic of equipment:
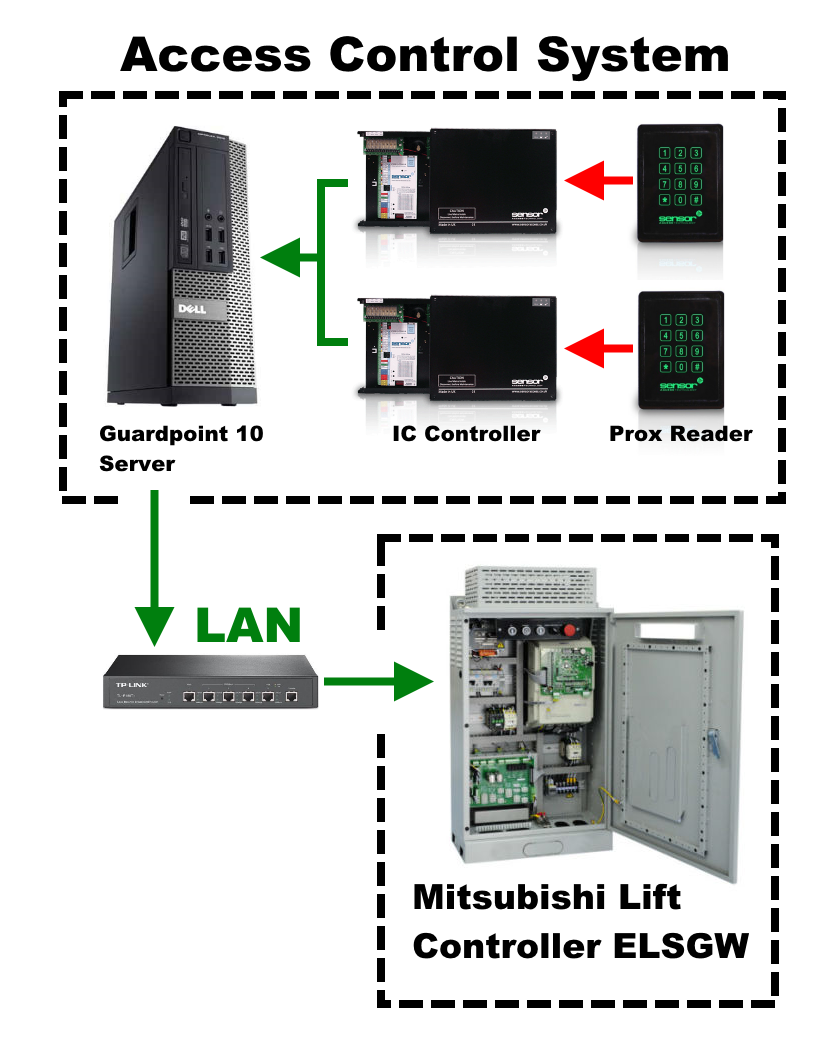
GuardPoint10 has the ability to send commands to a UDP port via its “Global reflex Module”
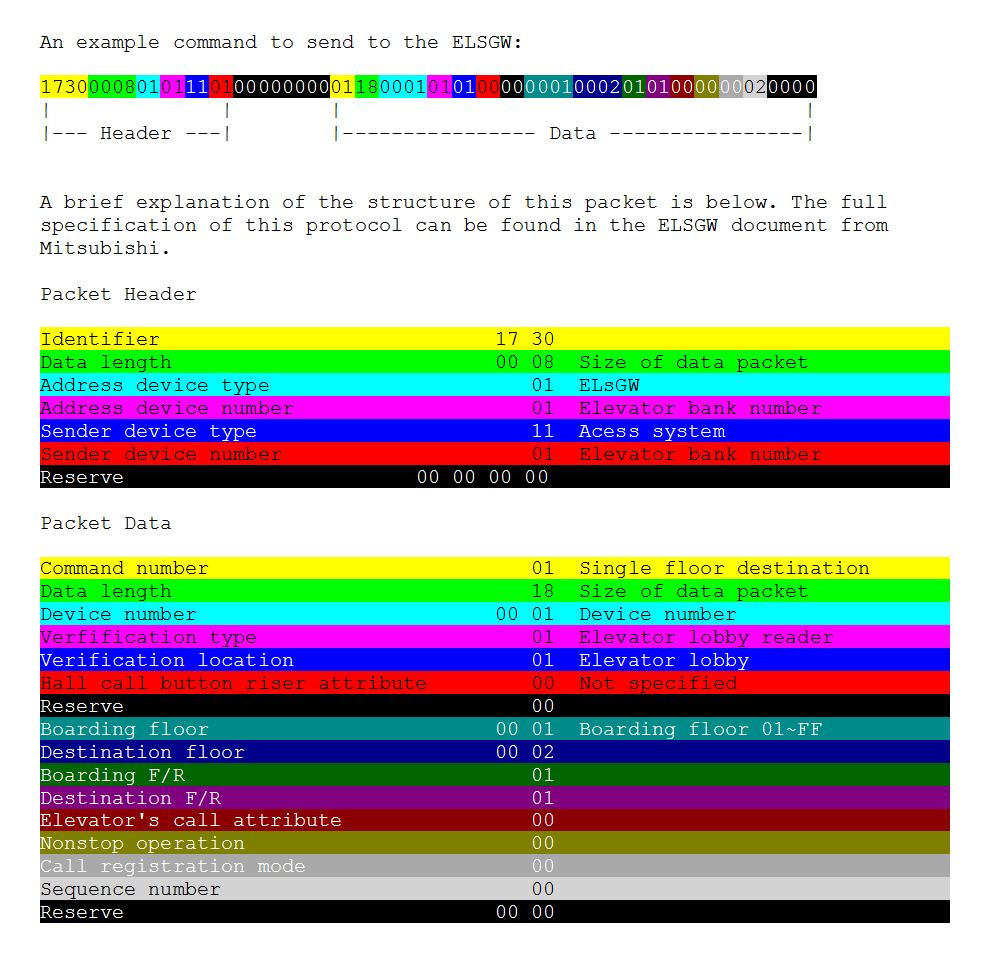
Lift commands can be sent this way but the command structure needs to be manually entered in accordance to the document “ELSGW Emulator Instruction Manual v1.03” available from Mitsubishi.
A brief explanation of the structure of this packet is below. The full specification of this protocol can be found in the ELSGW document from Mitsubishi.
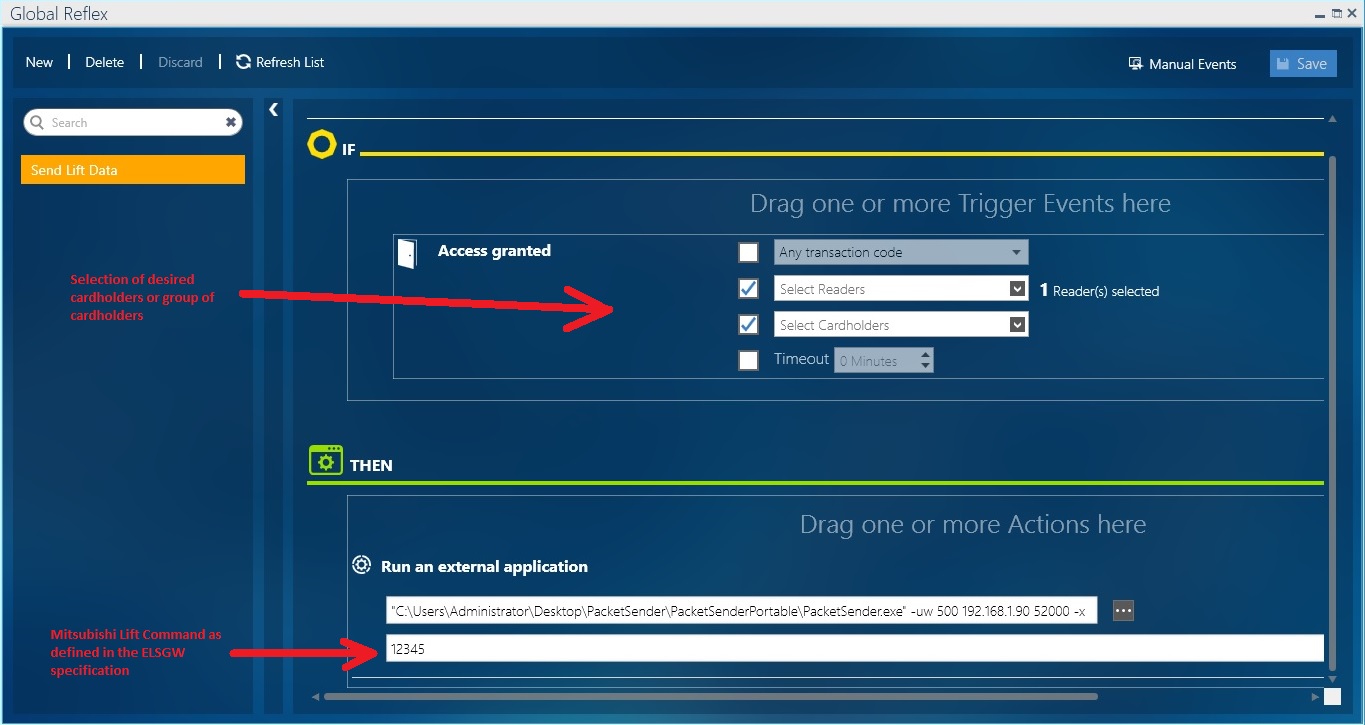
Below is a screenshot of the programming of a lift command in GuardPoint10. A tutorial can be found at https://youtu.be/NA-SANcn0SY
Depending on the access requirement of the building this process of creating lift commands could be too complex or time consuming. There is the possibility to develop a method of ticking boxes rather than writing the command. To develop such a solution would require the cost and time of a software developer.
A copy of the Lift Integration document can be found below and the Mitsubishi Lift Emulator can be found here.
Comments
0 comments
Please sign in to leave a comment.